Play all audios:
ABSTRACT Robotic surgery has the potential to fundamentally change interventional medicine by combining the complementary strengths of humans and machines. This can enhance safety as robots
begin to intelligently interact with surgeons during training and to intra-operatively assist at varying levels of control and autonomy. In parallel, miniaturization is advancing the
frontiers of how deeply robots can reach into the human body, and ergonomic user interfaces are improving the ability of surgeons to direct them. Improvements in tissue modelling, real-time
feedback and delivery of diverse energy sources are key drivers of practical, intelligent human–machine collaborative systems. In this Review, we discuss the design and application of
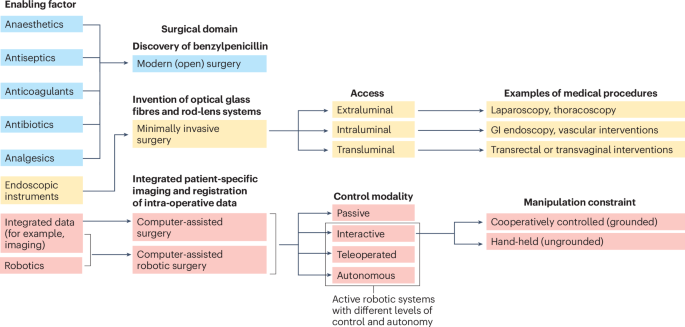
robotic systems in surgical procedures, outlining key elements in computer-assisted robotic surgery. Surgical robots are categorized based on the level of control and autonomy as passive,
interactive, teleoperated and autonomous platforms. We conclude by discussing future milestones and current research frontiers in the engineering and clinical domain of surgical robotic
systems. KEY POINTS * Robotic modules, such as image-guidance systems, mechatronics, sensing and control intelligence, soft materials, and energy sources for tissue manipulation and
dissection, are constitutive elements of computer-assisted robotic platforms for surgery. * Interventional medical robots can be classified by the level of control and autonomy in passive,
interactive, teleoperated and autonomous platforms. * Surgical robots can address human limitations and improve the safety and quality of interventional clinical procedures as well as
support surgical training and education. * Human-centred robotic platforms integrate tissue modelling and real-time energy source interaction monitoring to personalize and improve
interventional outcomes. Access through your institution Buy or subscribe This is a preview of subscription content, access via your institution ACCESS OPTIONS Access through your
institution Subscribe to this journal Receive 12 digital issues and online access to articles $119.00 per year only $9.92 per issue Learn more Buy this article * Purchase on SpringerLink *
Instant access to full article PDF Buy now Prices may be subject to local taxes which are calculated during checkout ADDITIONAL ACCESS OPTIONS: * Log in * Learn about institutional
subscriptions * Read our FAQs * Contact customer support SIMILAR CONTENT BEING VIEWED BY OTHERS THE EVOLUTION OF ROBOTICS: RESEARCH AND APPLICATION PROGRESS OF DENTAL IMPLANT ROBOTIC SYSTEMS
Article Open access 08 April 2024 THE IDEAL FRAMEWORK FOR SURGICAL ROBOTICS: DEVELOPMENT, COMPARATIVE EVALUATION AND LONG-TERM MONITORING Article 19 January 2024 AUTONOMOUS SURGERY IN THE
ERA OF ROBOTIC UROLOGY: FRIEND OR FOE OF THE FUTURE SURGEON? Article 23 September 2020 REFERENCES * Taylor, R. H. & Stoianovici, D. Medical robotics in computer-integrated surgery. _IEEE
Trans. Robot. Autom._ 19, 765–781 (2003). Article Google Scholar * Dupont, P. E. et al. A decade retrospective of medical robotics research from 2010 to 2020. _Sci. Robot._ 6, eabi8017
(2021). Article Google Scholar * Gorini, A. & Pravettoni, G. P5 medicine: a plus for a personalized approach to oncology. _Nat. Rev. Clin. Oncol._ 8, 444 (2011). Article Google
Scholar * Xu, X., Lu, Y., Vogel-Heuser, B. & Wang, L. Industry 4.0 and Industry 5.0 — inception, conception and perception. _J. Manuf. Syst._ 61, 530–535 (2021). Article Google Scholar
* Rosen, J., Hannaford, B. & Satava, R. M. _Surgical Robotics: Systems Applications and Visions_ (Springer Science & Business Media, 2011). * Siciliano, B. & Khatib, O. in
_Springer Handbook of Robotics_ (ed Khatib, O.) 1–6 (Springer, 2016). * Lavallée, S., Bainville, E. & Bricault, I. An overview of computer-integrated surgery and therapy. _Crit. Rev.
Diagn. Imaging_ 41, 157–236 (2000). Article Google Scholar * Kwoh, Y. S., Hou, J., Jonckheere, E. A. & Hayati, S. A robot with improved absolute positioning accuracy for CT guided
stereotactic brain surgery. _IEEE Trans. Biomed. Eng._ 35, 153–160 (1988). Article Google Scholar * Liow, M. H. L., Chin, P. L., Pang, H. N., Tay, D. K.-J. & Yeo, S.-J. THINK surgical
TSolution-One®(Robodoc) total knee arthroplasty. _SICOT J._ 3, 63 (2017). Article Google Scholar * Adler, J. R. Jr et al. The Cyberknife: a frameless robotic system for radiosurgery.
_Stereotact. Funct. Neurosurg._ 69, 124–128 (1997). Article Google Scholar * Haidegger, T. Autonomy for surgical robots: concepts and paradigms. _IEEE Trans. Med. Robot. Bionics_ 1, 65–76
(2019). Article Google Scholar * Ebrahimi, N. et al. Magnetic actuation methods in bio/soft robotics. _Adv. Funct. Mater._ 31, 2005137 (2021). THIS REVIEW DISCUSSES MAGNETICALLY ACTUATED
SOFT ROBOTS, INCLUDING THEIR FABRICATION PROCESSES, ACTUATION METHODS AND BIOMEDICAL APPLICATIONS. Article Google Scholar * Li, J., Esteban-Fernández de Ávila, B., Gao, W., Zhang, L. &
Wang, J. Micro/nanorobots for biomedicine: delivery, surgery, sensing, and detoxification. _Sci. Robot._ 2, eaam6431 (2017). Article Google Scholar * Sistrom, C. L. & McKay, N. L.
Costs, charges, and revenues for hospital diagnostic imaging procedures: differences by modality and hospital characteristics. _J. Am. Coll. Radiol._ 2, 511–519 (2005). Article Google
Scholar * Seah, J., Brady, Z., Ewert, K. & Law, M. Artificial intelligence in medical imaging: implications for patient radiation safety. _Br. J. Radiol._ 94, 20210406 (2021). Article
Google Scholar * Leibrandt, K., Marcus, H. J., Kwok, K.-W. & Yang, G.-Z. Implicit active constraints for a compliant surgical manipulator. In _2014 IEEE International Conference on
Robotics and Automation (ICRA)_ 276–283 (IEEE, 2014). * Kwok, W. E. Basic principles of and practical guide to clinical MRI radiofrequency coils. _RadioGraphics_ 42, 898–918 (2022). Article
Google Scholar * Chadebecq, F., Lovat, L. B. & Stoyanov, D. Artificial intelligence and automation in endoscopy and surgery. _Nat. Rev. Gastroenterol. Hepatol._ 20, 171–182 (2023).
Article Google Scholar * Yang, T. et al. A lumen-adapted navigation scheme with spatial awareness from monocular vision for autonomous robotic endoscopy. _Robot. Auton. Syst._ 165, 104444
(2023). Article Google Scholar * Brandao, P. et al. in _Medical Imaging 2017: Computer-Aided Diagnosis_ (eds Armato, S. G. III & Petrick, N. A.) 101–107 (SPIE, 2017). * Saeidi, H. et
al. Autonomous robotic laparoscopic surgery for intestinal anastomosis. _Sci. Robot._ 7, eabj2908 (2022). Article Google Scholar * Ma, Y. et al. Shape-guided configuration-aware learning
for endoscopic-image-based pose estimation of flexible robotic instruments. In_ European Conference on Computer Vision (ECCV)_ 259–276 (Springer-Verlag, 2024). * Xu, H., Runciman, M.,
Cartucho, J., Xu, C. & Giannarou, S. Graph-based pose estimation of texture-less surgical tools for autonomous robot control. In _2023 IEEE International Conference on Robotics and
Automation (ICRA)_ 2731–2737 (IEEE, 2023). * Lu, J., Richter, F. & Yip, M. C. Pose estimation for robot manipulators via keypoint optimization and sim-to-real transfer. _IEEE Robot.
Autom. Lett._ 7, 4622–4629 (2022). Article Google Scholar * Tian, Y., Zhang, J., Yin, Z. & Dong, H. Robot structure prior guided temporal attention for camera-to-robot pose estimation
from image sequence. In _Proc. IEEE/CVF Conference on Computer Vision and Pattern Recognition_ 8917–8926 (IEEE, 2023). * Zhong, X. et al. G-SAM: a robust one-shot keypoint detection
framework for PnP based robot pose estimation. _J. Intell. Robotic Syst._ 109, 28 (2023). Article Google Scholar * Lu, J., Liu, F., Girerd, C. & Yip, M. C. Image-based pose estimation
and shape reconstruction for robot manipulators and soft, continuum robots via differentiable rendering. In _2023 IEEE International Conference on Robotics and Automation (ICRA)_ 560–567
(IEEE, 2023). * Lu, J., Richter, F., Lin, S. & Yip, M. C. Tracking snake-like robots in the wild using only a single camera. In _2024 IEEE International Conference on Robotics and
Automation (ICRA)_ 2660–2666 (IEEE, 2024). Article Google Scholar * Tanaka, K. et al. Continuum-body-pose estimation from partial sensor information using recurrent neural networks. _IEEE
Robot. Autom. Lett._ 7, 11244–11251 (2022). Article Google Scholar * Souipas, S., Nguyen, A., Laws, S. G., Davies, B. L. & Rodriguez y Baena, F. SimPS-net: simultaneous pose &
segmentation network of surgical tools. _IEEE Trans. Medical Robot. Bionics_ 5, 614–622 (2023). Article Google Scholar * Valassakis, E., Dreczkowski, K. & Johns, E. Learning
eye-in-hand camera calibration from a single image. In _Proc. 5th Conference on Robot Learning_ 1336–1346 (PMLR, 2022). * Yoshimura, M., Marinho, M. M., Harada, K. & Mitsuishi, M.
Single-shot pose estimation of surgical robot instruments’ shafts from monocular endoscopic images. In _2020 IEEE International Conference on Robotics and Automation (ICRA)_ 9960–9966 (IEEE,
2020). * Wang, Y. et al. Multimodal token fusion for vision transformers. In _Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition_ 12176–12185 (IEEE, 2022). *
Xu, P., Zhu, X. & Clifton, D. A. Multimodal learning with transformers: a survey. _IEEE Trans. Pattern Anal. Mach. Intell._ 45, 12113–12132 (2023). Article Google Scholar * Lin, M.-X.
et al. Single image 3D shape retrieval via cross-modal instance and category contrastive learning. In _Proc. IEEE/CVF International Conference on Computer Vision_ 11385–11395 (IEEE, 2021). *
Arsomngern, P., Nutanong, S. & Suwajanakorn, S. Learning geometric-aware properties in 2D representation using lightweight CAD models, or zero real 3D pairs. In _Proc.__ IEEE/CVF
Conference on Computer Vision and Pattern Recognition_ 21371–21381 (IEEE, 2023). * Webster, R. J. III & Jones, B. A. Design and kinematic modeling of constant curvature continuum robots:
a review. _Int. J. Robot. Res._ 29, 1661–1683 (2010). Article Google Scholar * Kazanzides, P. in _Robotics in Surgery: History, Current Future Applications_ (ed Faust, R. A.) Ch. 5 (Nova
Publishers, 2007). * Anderson, P. L., Lathrop, R. A. & Webster, R. J. III Robot-like dexterity without computers and motors: a review of hand-held laparoscopic instruments with
wrist-like tip articulation. _Expert Rev. Med. Devices_ 13, 661–672 (2016). Article Google Scholar * DiMaio, S., Hanuschik, M. & Kreaden, U. in _Surgical Robotics_ (eds Rosen, J.,
Hannaford, B. & Satava, R.) 199–217 (Springer, 2011). * Guthart, G. S. & Salisbury, J. K. The IntuitiveTM telesurgery system: overview and application. In _Proc. IEEE International
Conference on Robotics and Automation (ICRA)_ 618–621 (IEEE, 2000). * Harvey, L. et al. A novel robotic endoscopic device used for operative hysteroscopy. _J. Minim. Invasive Gynecol._ 27,
1631–1635 (2020). Article Google Scholar * Fan, C., Dodou, D. & Breedveld, P. Review of manual control methods for handheld maneuverable instruments. _Minim. Invasive Ther. Allied
Technol._ 22, 127–135 (2013). Article Google Scholar * Payne, C. J. & Yang, G.-Z. Hand-held medical robots. _Ann. Biomed. Eng._ 42, 1594–1605 (2014). THIS REVIEW HIGHLIGHTS THE
FUNCTIONAL TAXONOMY AND KEY EXAMPLES OF INTERACTIVE HAND-HELD (UNGROUNDED) ROBOTS IN MEDICAL APPLICATIONS. Article Google Scholar * Hendrick, R. J., Mitchell, C. R., Herrell, S. D. &
Webster, R. J. III Hand-held transendoscopic robotic manipulators: a transurethral laser prostate surgery case study. _Int. J. Robot. Res._ 34, 1559–1572 (2015). Article Google Scholar *
Burgner-Kahrs, J., Rucker, D. C. & Choset, H. Continuum robots for medical applications: a survey. _IEEE Trans. Robot._ 31, 1261–1280 (2015). Article Google Scholar * Freyaldenhoven,
S. T. & Tsukada, H. Robotics in the diagnosis and staging of lung cancer. _J. Surg. Oncol._ 127, 258–261 (2023). Article Google Scholar * Wegermann, Z. K., Swaminathan, R. V. &
Rao, S. V. Cath lab robotics: paradigm change in interventional cardiology? _Curr. Cardiol. Rep._ 21, 119 (2019). Article Google Scholar * Gafford, J. B. et al. A concentric tube robot
system for rigid bronchoscopy: a feasibility study on central airway obstruction removal. _Ann. Biomed. Eng._ 48, 181–191 (2020). Article Google Scholar * Rucker, D. C., Jones, B. A. &
Webster, R. J. III A geometrically exact model for externally loaded concentric-tube continuum robots. _IEEE Trans. Robot._ 26, 769–780 (2010). Article Google Scholar * Dupont, P. E.,
Lock, J., Itkowitz, B. & Butler, E. Design and control of concentric-tube robots. _IEEE Trans. Robot._ 26, 209–225 (2009). Article Google Scholar * Orekhov, A., Abah, C. & Simaan,
N. in _The Encyclopedia of Medical Robotics (In 4 Volumes)_ Vol. 1 203–243 (World Scientific, 2018). * Cianchetti, M., Laschi, C., Menciassi, A. & Dario, P. Biomedical applications of
soft robotics. _Nat. Rev. Mater._ 3, 143–153 (2018). THIS REVIEW DISCUSSES SOFT ROBOTS FOR BIOMEDICAL APPLICATIONS, HIGHLIGHTING SOFT AND ACTIVE MATERIALS AS WELL AS DIFFERENT ACTUATION
STRATEGIES. Article Google Scholar * Chiu, P. W. Y., Ho, K. Y. & Phee, S. J. Colonic endoscopic submucosal dissection using a novel robotic system (with video). _Gastrointest.
Endoscopy_ 93, 1172–1177 (2021). Article Google Scholar * Sorriento, A. et al. Optical and electromagnetic tracking systems for biomedical applications: a critical review on potentialities
and limitations. _IEEE Rev. Biomed. Eng._ 13, 212–232 (2019). THIS REVIEW EXAMINES LOCALIZERS (MAINLY OPTICAL AND ELECTROMAGNETIC TRACKERS) AND SURGICAL NAVIGATORS FOR BIOMEDICAL
APPLICATIONS. Article Google Scholar * Lefranc, M. & Peltier, J. Evaluation of the ROSA™ spine robot for minimally invasive surgical procedures. _Expert Rev. Med. Devices_ 13, 899–906
(2016). Article Google Scholar * Lonjon, N. et al. Robot-assisted spine surgery: feasibility study through a prospective case-matched analysis. _Eur. Spine J._ 25, 947–955 (2016). Article
Google Scholar * Crawford, N., Johnson, N. & Theodore, N. Ensuring navigation integrity using robotics in spine surgery. _J. Robotic Surg._ 14, 177–183 (2020). Article Google Scholar
* Poulin, F. & Amiot, L.-P. Interference during the use of an electromagnetic tracking system under OR conditions. _J. Biomech._ 35, 733–737 (2002). Article Google Scholar * Guo, Z.
et al. Compact design of a hydraulic driving robot for intraoperative MRI-guided bilateral stereotactic neurosurgery. _IEEE Robot. Autom. Lett._ 3, 2515–2522 (2018). Article Google Scholar
* Bock, M. et al. MR‐guided intravascular procedures: real‐time parameter control and automated slice positioning with active tracking coils. _J. Magn. Reson. Imaging_ 19, 580–589 (2004).
Article Google Scholar * Rea, M. et al. System for 3-D real-time tracking of MRI-compatible devices by image processing. _IEEE/ASME Trans. Mechatron._ 13, 379–382 (2008). Article Google
Scholar * Eggers, H., Weiss, S., Boernert, P. & Boesiger, P. Image‐based tracking of optically detunable parallel resonant circuits. _Magn. Reson. Med._ 49, 1163–1174 (2003). Article
Google Scholar * Su, H. et al. State of the art and future opportunities in MRI-guided robot-assisted surgery and interventions. _Proc. IEEE Inst. Electr. Electron. Eng._ 110, 968–992
(2022). Article Google Scholar * Wang, X. et al. Experimental validation of robot-assisted cardiovascular catheterization: model-based versus model-free control. _Int. J. Comput. Assist.
Radiol. Surg._ 13, 797–804 (2018). Article Google Scholar * Kwok, K.-W., Wurdemann, H., Arezzo, A., Menciassi, A. & Althoefer, K. Soft robot-assisted minimally invasive surgery and
interventions: advances and outlook. _Proc. IEEE Inst. Electr. Electron. Eng._ 110, 871–892 (2022). Article Google Scholar * Wang, X. et al. Eye-in-hand visual servoing enhanced with
sparse strain measurement for soft continuum robots. _IEEE Robot. Autom. Lett._ 5, 2161–2168 (2020). Article Google Scholar * Dong, Z. et al. Shape tracking and feedback control of cardiac
catheter using MRI-guided robotic platform— validation with pulmonary vein isolation simulator in MRI. _IEEE Trans. Robot._ 38, 2781–2798 (2022). Article Google Scholar * Shi, C. et al.
Shape sensing techniques for continuum robots in minimally invasive surgery: a survey. _IEEE Trans. Biomed. Eng._ 64, 1665–1678 (2016). Article Google Scholar * Gerboni, G., Diodato, A.,
Ciuti, G., Cianchetti, M. & Menciassi, A. Feedback control of soft robot actuators via commercial flex bend sensors. _IEEE/ASME Trans. Mechatron._ 22, 1881–1888 (2017). Article Google
Scholar * Chen, Z. et al. Data-driven methods applied to soft robot modeling and control: a review. _IEEE Transact. Automation Sci. Eng._ 22, 2241–2256 (2025). Article Google Scholar *
Fang, G. et al. Soft robotic manipulator for intraoperative MRI-guided transoral laser microsurgery. _Sci. Robot._ 6, eabg5575 (2021). Article Google Scholar * Lee, K.-H. et al.
Nonparametric online learning control for soft continuum robot: an enabling technique for effective endoscopic navigation. _Soft Robot._ 4, 324–337 (2017). Article Google Scholar * Fang,
G. et al. Vision-based online learning kinematic control for soft robots using local Gaussian process regression. _IEEE Robot. Autom. Lett._ 4, 1194–1201 (2019). Article Google Scholar *
Wang, K. et al. A fast soft robotic laser sweeping system using data-driven modeling approach. _IEEE Trans. Robot._ 39, 3043–3058 (2023). Article Google Scholar * Wang, X. et al.
Learning-based visual-strain fusion for eye-in-hand continuum robot pose estimation and control. _IEEE Trans. Robot._ 39, 2448–2467 (2023). Article Google Scholar * Polydoros, A. S. &
Nalpantidis, L. Survey of model-based reinforcement learning: applications on robotics. _J. Intell. Robotic Syst._ 86, 153–173 (2017). Article Google Scholar * Jell, A. et al. Robotic
endoscope control-state of the art of voice control and other options for laparoscopic camera robot guidance. _Surg. Technol. Int._ 40, 17–24 (2022). Google Scholar * Bapna, T., Valles, J.,
Leng, S., Pacilli, M. & Nataraja, R. M. Eye‐tracking in surgery: a systematic review. _ANZ J. Surg._ 93, 2600–2608 (2023). Article Google Scholar * Esfandiari, H. et al. Introducing a
brain-computer interface to facilitate intraoperative medical imaging control — a feasibility study. _BMC Musculoskelet. Disord._ 23, 701 (2022). Article Google Scholar * Bergholz, M.,
Ferle, M. & Weber, B. M. The benefits of haptic feedback in robot assisted surgery and their moderators: a meta-analysis. _Sci. Rep._ 13, 19215 (2023). Article Google Scholar * Yang,
Z., Yang, H., Cao, Y., Cui, Y. & Zhang, L. Magnetically actuated continuum medical robots: a review. _Adv. Intell. Syst._ 2200416, 5 (2023). Google Scholar * Ciuti, G., Menciassi, A.
& Dario, P. Capsule endoscopy: from current achievements to open challenges. _IEEE Rev. Biomed. Eng._ 4, 59–72 (2011). Article Google Scholar * Tillander, H. Magnetic guidance of a
catheter with articulated steel tip. _Acta Radiol._ 35, 62–64 (1951). Article Google Scholar * Verra, M. et al. Robotic-assisted colonoscopy platform with a magnetically-actuated
soft-tethered capsule. _Cancers_ 12, 2485 (2020). Article Google Scholar * Armacost, M. P. et al. Accurate and reproducible target navigation with the Stereotaxis Niobe® magnetic
navigation system. _J. Cardiovasc. Electrophysiol._ 18, S26–S31 (2007). Article Google Scholar * Filgueiras-Rama, D. et al. Remote magnetic navigation for accurate, real-time catheter
positioning and ablation in cardiac electrophysiology procedures. _J. Vis. Exp._ 21, e3658 (2013). Google Scholar * Dong, Y. et al. Magnetic helical micro-/nanomachines: recent progress and
perspective. _Matter_ 5, 77–109 (2022). Article Google Scholar * Aziz, A. et al. Medical imaging of microrobots: toward in vivo applications. _ACS Nano_ 14, 10865–10893 (2020). Article
Google Scholar * Runciman, M., Darzi, A. & Mylonas, G. P. Soft robotics in minimally invasive surgery. _Soft Robot._ 6, 423–443 (2019). Article Google Scholar * Fu, H.-C. et al.
Interfacing soft and hard: a spring reinforced actuator. _Soft Robot._ 7, 44–58 (2020). Article Google Scholar * He, Z. et al. Design of a percutaneous MRI-guided needle robot with soft
fluid-driven actuator. _IEEE Robot. Autom. Lett._ 5, 2100–2107 (2020). Article Google Scholar * Rucker, D. C. & Webster, R. J. III Statics and dynamics of continuum robots with general
tendon routing and external loading. _IEEE Trans. Robot._ 27, 1033–1044 (2011). Article Google Scholar * Ciuti, G. et al. Frontiers of robotic colonoscopy: a comprehensive review of
robotic colonoscopes and technologies. _J. Clin. Med._ 9, 1648 (2020). Article Google Scholar * Marlicz, W. et al. Frontiers of robotic gastroscopy: a comprehensive review of robotic
gastroscopes and technologies. _Cancers_ 12, 2775 (2020). Article Google Scholar * Zhang, Y. & Lu, M. A review of recent advancements in soft and flexible robots for medical
applications. _Int. J. Med. Robot. Comput. Assist. Surg._ 16, e2096 (2020). Article Google Scholar * Wu, Z. et al. A robotic surgical tool with continuum wrist, kinematically optimized
curved stem, and collision avoidance kinematics for single port procedure. _Mech. Mach. Theory_ 173, 104863 (2022). Article Google Scholar * Wang, X. et al. in _Machine Learning, Medical
AI and Robotics: Translating Theory into the Clinic_ (eds Vardhanabhuti, V. et al.) 7.1–7.31 (IOP Publishing, 2023). * Bacchetti, A. et al. Optimization and fabrication of programmable
domains for soft magnetic robots: a review. _Front. Robot. AI_ 9, 1040984 (2022). Article Google Scholar * Mihcin, S. & Melzer, A. Principles of focused ultrasound. _Minim. Invasive
Ther. Allied Technol._ 27, 41–50 (2018). Article Google Scholar * Wu, A. Physics and dosimetry of the gamma knife. _Neurosurg. Clin. North Am._ 3, 35–50 (1992). Article Google Scholar *
Teh, B. S., Woo, S. Y. & Butler, E. B. Intensity modulated radiation therapy (IMRT): a new promising technology in radiation oncology. _Oncologist_ 4, 433–442 (1999). Article Google
Scholar * Jeraj, M. & Robar, V. Multileaf collimator in radiotherapy. _Radiol. Oncol_. 38, (2004). * Adler, J. R. Jr, Murphy, M. J., Chang, S. D. & Hancock, S. L. Image-guided
robotic radiosurgery. _Neurosurgery_ 44, 1299–1306 (1999). Google Scholar * Tognarelli, S., Ciuti, G., Diodato, A., Cafarelli, A. & Menciassi, A. Robotic platform for high-intensity
focused ultrasound surgery under ultrasound tracking: the FUTURA platform. _J. Med. Robot. Res._ 2, 1740010 (2017). Article Google Scholar * Mariani, A., Morchi, L., Diodato, A.,
Tognarelli, S. & Menciassi, A. High-intensity focused ultrasound surgery based on KUKA robot: a computer-assisted platform for noninvasive surgical treatments on static and moving
organs. _IEEE Robot. Autom. Mag._ 30, 79–93 (2023). Article Google Scholar * Sotiras, A., Davatzikos, C. & Paragios, N. Deformable medical image registration: a survey. _IEEE Trans.
Med. Imaging_ 32, 1153–1190 (2013). Article Google Scholar * Yang, Y. & Wu, H. Deformable medical image registration based on CNN. _J. Xray Sci. Technol._ 31, 85–94 (2023). Google
Scholar * Taylor, R. H., Menciassi, A., Fichtinger, G., Fiorini, P. & Dario, P. in _Springer Handbook of Robotics_ (ed Khatib, O.) 1657–1684 (Springer, 2016). THIS BOOK CHAPTER
DISCUSSES MEDICAL ROBOTICS AND COMPUTER-INTEGRATED SURGERY. * Yang, G.-Z. et al. Medical robotics—Regulatory, ethical, and legal considerations for increasing levels of autonomy. _Sci.
Robot._ 2, eaam8638 (2017). Article Google Scholar * Attanasio, A., Scaglioni, B., De Momi, E., Fiorini, P. & Valdastri, P. Autonomy in surgical robotics. _Annu. Rev. Control Robot.
Auton. Syst._ 4, 651–679 (2021). THIS REVIEW INVESTIGATES AUTOMATIC AND AUTONOMOUS BEHAVIOURS OF SURGICAL ROBOTS, DESCRIBING THEIR TAXONOMY AS LEVELS OF AUTONOMY AS WELL AS ENABLING
TECHNOLOGIES. Article Google Scholar * Lee, A., Baker, T. S., Bederson, J. B. & Rapoport, B. I. Levels of autonomy in FDA-cleared surgical robots: a systematic review. _npj Digital
Med._ 7, 103 (2024). Article Google Scholar * Rossi, V. J., Wells-Quinn, T. A. & Malham, G. M. Negotiating for new technologies: guidelines for the procurement of assistive
technologies in spinal surgery: a narrative review. _J. Spine Surg._ 8, 254 (2022). Article Google Scholar * Jakopec, M. et al. Preliminary results of an early clinical experience with the
AcrobotTM system for total knee replacement surgery. In _Medical Image Computing and Computer-Assisted Intervention — MICCAI 2002. Proceedings, Part I_ (eds Dohi, T. & Kikinis, R.)
256–263 (Springer, 2002). * Jakopec, M. et al. The first clinical application of a “hands-on” robotic knee surgery system. _Comput. Aided Surg._ 6, 329–339 (2001). Article Google Scholar *
Nd, I. R. et al. Robotic-assisted total hip arthroplasty: outcomes at minimum two-year follow-up. _Surg. Technol. Int._ 30, 365–372 (2017). Google Scholar * Kayani, B., Konan, S.,
Tahmassebi, J., Pietrzak, J. & Haddad, F. Robotic-arm assisted total knee arthroplasty is associated with improved early functional recovery and reduced time to hospital discharge
compared with conventional jig-based total knee arthroplasty: a prospective cohort study. _Bone Jt J._ 100, 930–937 (2018). Article Google Scholar * Kleeblad, L. J. et al. Midterm
survivorship and patient satisfaction of robotic-arm-assisted medial unicompartmental knee arthroplasty: a multicenter study. _J. Arthroplasty_ 33, 1719–1726 (2018). Article Google Scholar
* Taylor, R. et al. A steady-hand robotic system for microsurgical augmentation. _Int. J. Robot. Res._ 18, 1201–1210 (1999). Article Google Scholar * Ang, W. T., Riviere, C. N. &
Khosla, P. K. An active hand-held instrument for enhanced microsurgical accuracy. In _Medical Image Computing and Computer-Assisted Intervention — MICCAI 2000_ (eds Delp, S. L. et al.)
878–886 (Springer, 2000). * MacLachlan, R. A. et al. Micron: an actively stabilized handheld tool for microsurgery. _IEEE Trans. Robot._ 28, 195–212 (2012). Article Google Scholar *
Becker, B. C., MacLachlan, R. A., Lobes, L. A., Hager, G. D. & Riviere, C. N. Vision-based control of a handheld surgical micromanipulator with virtual fixtures. _IEEE Trans. Robot._ 29,
674–683 (2013). Article Google Scholar * Gonenc, B. et al. Preliminary evaluation of a micro-force sensing handheld robot for vitreoretinal surgery. In _2012_ _IEEE/RSJ International
Conference on Intelligent Robots and Systems_ 4125–4130 (IEEE, 2012). * Lonner, J. H. _Robotics in Knee and Hip Arthroplasty: Current Concepts, Techniques and Emerging Uses_ (Springer,
2019). * Lonner, J. H. Robotically assisted unicompartmental knee arthroplasty with a handheld image-free sculpting tool. _Oper. Tech. Orthop._ 25, 104–113 (2015). Article Google Scholar *
Ballantyne, G. H. Robotic surgery, telerobotic surgery, telepresence, and telementoring. _Surg. Endosc._ 16, 1389–1402 (2002). Article Google Scholar * Kommu, S. S., Rimington, P.,
Anderson, C. & Rané, A. Initial experience with the EndoAssist camera-holding robot in laparoscopic urological surgery. _J. Robotic Surg._ 1, 133–137 (2007). Article Google Scholar *
Ballester, P., Jain, Y., Haylett, K. R. & McCloy, R. F. Comparison of task performance of robotic camera holders EndoAssist and Aesop. _Int. Cong. Ser._ 1230, 1100–1103 (2011). Article
Google Scholar * Morelli, L. et al. Da Vinci single site© surgical platform in clinical practice: a systematic review. _Int. J. Med. Robot. Comput. Assist. Surg._ 12, 724–734 (2016).
Article Google Scholar * D’Ettorre, C. et al. Accelerating surgical robotics research: a review of 10 years with the da vinci research kit. _IEEE Robot. Autom. Mag._ 28, 56–78 (2021). THIS
REVIEW DISCUSSES THE DA VINCI RESEARCH KIT, HIGHLIGHTING RESEARCH EFFORTS AND MAJOR CHALLENGES. Article Google Scholar * Freschi, C. et al. Technical review of the da Vinci surgical
telemanipulator. _Int. J. Med. Robot. Comput. Assist. Surg._ 9, 396–406 (2013). Article Google Scholar * Longmore, S. K., Naik, G. & Gargiulo, G. D. Laparoscopic robotic surgery:
current perspective and future directions. _Robotics_ 9, 42 (2020). Article Google Scholar * Ngu, J. C.-Y., Lin, C. C.-W., Sia, C. J.-Y. & Teo, N.-Z. A narrative review of the
Medtronic Hugo RAS and technical comparison with the Intuitive da Vinci robotic surgical system. _J. Robotic Surg._ 18, 99 (2024). Article Google Scholar * Rusch, M. et al. Evaluation of
the MMI Symani® robotic microsurgical system for coronary-bypass anastomoses in a cadaveric porcine model. _J. Robotic Surg._ 18, 168 (2024). Article Google Scholar * Saeidi, H. et al.
Autonomous laparoscopic robotic suturing with a novel actuated suturing tool and 3D endoscope. In _2019 International Conference on Robotics and Automation (ICRA)_ 1541–1547 (IEEE, 2019). *
Li, Q. H. et al. The application accuracy of the NeuroMate robot — a quantitative comparison with frameless and frame-based surgical localization systems. _Comput. Aided Surg._ 7, 90–98
(2002). Article Google Scholar * Mittelstadt, B. et al. Development of a surgical robot for cementless total hip replacement. _Robotica_ 11, 553–560 (1993). Article Google Scholar *
Haidegger, T. & Rudas, I. J. in _Human-Computer Interaction: Concepts, Methodologies, Tools, and Applications_ 484–522 (IGI Global, 2016). * Biswas, P., Sikander, S. & Kulkarni, P.
Recent advances in robot-assisted surgical systems. _Biomed. Eng. Adv._ 6, 100109 (2023). Article Google Scholar * O’Connor, T. E. et al. Mazor X Stealth robotic technology: a technical
note. _World Neurosurg._ 145, 435–442 (2020). Article Google Scholar * Galetta, M. S., Leider, J. D., Divi, S. N., Goyal, D. K. & Schroeder, G. D. Robotics in spinal surgery. _Ann.
Transl. Med._ 7, S165 (2019). Article Google Scholar * Kito, S. in _Stereotactic Body Radiation Therapy: Principles and Practices_ (ed. Nagata, Y.) 255–262 (Springer, 2023). * Brandner, E.
D., Chetty, I. J., Giaddui, T. G., Xiao, Y. & Huq, M. S. Motion management strategies and technical issues associated with stereotactic body radiotherapy of thoracic and upper abdominal
tumors: a review from NRG oncology. _Med. Phys._ 44, 2595–2612 (2017). Article Google Scholar * Julian, D. et al. A comparative analysis and guide to virtual reality robotic surgical
simulators. _Int. J. Med. Robot. Comput. Assist. Surg._ 14, e1874 (2018). Article Google Scholar * Mizota, T., Dodge, V. G. & Stefanidis, D. in _Fundamentals of General Surgery_ (ed.
Palazzo, F.) 215–225 (2018). * Smith, R., Patel, V. & Satava, R. Fundamentals of robotic surgery: a course of basic robotic surgery skills based upon a 14‐society consensus template of
outcomes measures and curriculum development. _Int. J. Med. Robot. Comput. Assist. Surg._ 10, 379–384 (2014). Article Google Scholar * Satava, R. M. et al. Proving the effectiveness of the
fundamentals of robotic surgery (FRS) skills curriculum: a single-blinded, multispecialty, multi-institutional randomized control trial. _Ann. Surg._ 272, 384–392 (2020). Article Google
Scholar * Finocchiaro, M. et al. Training simulators for gastrointestinal endoscopy: current and future perspectives. _Cancers_ 13, 1427 (2021). Article Google Scholar * Finocchiaro, M.
et al. Physical simulator for colonoscopy: a modular design approach and clinical validation. _IEEE Access._ 11, 36945–36960 (2023). Article Google Scholar * A framework for the evaluation
of human machine interfaces of robot-assisted colonoscopy. _IEEE Trans. Biomed. Eng_. 71, 410–422 (2024). THIS ARTICLE REPORTS A VIRTUAL SIMULATOR AND MONITORING PLATFORM FOR THE TRAINING
AND ASSESSMENT OF CONTROL INTERFACES AS WELL AS STRATEGIES FOR TELEOPERATED OR AUTONOMOUS ROBOTIC ENDOSCOPES. * Hood, L. & Friend, S. H. Predictive, personalized, preventive,
participatory (P4) cancer medicine. _Nat. Rev. Clin. Oncol._ 8, 184–187 (2011). Article Google Scholar * Flores, M., Glusman, G., Brogaard, K., Price, N. D. & Hood, L. P4 medicine: how
systems medicine will transform the healthcare sector and society. _Pers. Med._ 10, 565–576 (2013). Article Google Scholar * Waelkens, P., van Oosterom, M. N., van den Berg, N. S., Navab,
N. & van Leeuwen, F. W. in _Radioguided Surgery: Current Applications and Innovative Directions in Clinical Practice_ (eds Herrmann, K. et al.) 57–73 (Springer, 2016). * Schleer, P.,
Drobinsky, S., de la Fuente, M. & Radermacher, K. Toward versatile cooperative surgical robotics: a review and future challenges. _Int. J. Comput. Assist. Radiol. Surg._ 14, 1673–1686
(2019). Article Google Scholar * Dimitrakakis, E. et al. Handheld robotic device for endoscopic neurosurgery: system integration and pre-clinical evaluation. _Front. Robot. AI_ 11, 1400017
(2024). Article Google Scholar * Okamura, A. M. Methods for haptic feedback in teleoperated robot‐assisted surgery. _Ind. Rob._ 31, 499–508 (2004). Article Google Scholar * Dagnino, G.
& Kundrat, D. Robot-assistive minimally invasive surgery: trends and future directions. _Int. J. Intell. Robot. Appl._ 8, 812–826 (2024). Article Google Scholar * Schmidt, A.,
Mohareri, O., DiMaio, S., Yip, M. C. & Salcudean, S. E. Tracking and mapping in medical computer vision: a review. _Med. Image Anal._ 94, 103131 (2024). Article Google Scholar *
Shatrov, J. & Parker, D. Computer and robotic-assisted total knee arthroplasty: a review of outcomes. _J. Exp. Orthop._ 7, 70 (2020). Article Google Scholar * Kim, J., Seol, Y., Jang,
H. S. & Kang, Y.-N. in _Ionizing Non-ionizing Radiation_ (ed Osibote, O. A.) Ch. 7 (InTech Open, 2020). * Gawande, A. Two hundred years of surgery REPLY. _N. Engl. J. Med._ 367, 479–479
(2012). Article Google Scholar * Fleming, A. On the antibacterial action of cultures of a penicillium, with special reference to their use in the isolation of B. influenzae. _Br. J. Exp.
Pathol._ 10, 226 (1929). Google Scholar * Bhatt, J. et al. Harold Horace Hopkins: a short biography. _BJU Int._ 106, 1425–1428 (2010). Article Google Scholar * Peter, S. D. S. &
Holcomb III, G. W. _History of Minimally Invasive Surgery_ 1–5 (Elsevier Health Sciences, 2008). * Vitiello, V., Lee, S. L., Cundy, T. P. & Yang, G. Z. Emerging robotic platforms for
minimally invasive surgery. _IEEE Rev. Biomed. Eng._ 6, 111–126 (2013). Article Google Scholar * Bergeles, C. & Yang, G. Z. From passive tool holders to microsurgeons: safer, smaller,
smarter surgical robots. _IEEE Trans. Biomed. Eng._ 61, 1565–1576 (2014). Article Google Scholar * Sittig, D. F., Ash, J. S. & Ledley, R. S. The story behind the development of the
first whole-body computerized tomography scanner as told by Robert S. Ledley. _J. Am. Med. Inf. Assoc._ 13, 465–469 (2006). Article Google Scholar * Fosch-Villaronga, E. _Robots,
Healthcare, and the Law: Regulating Automation in Personal Care_ 1st edn (Routledge, 2019). * Amram, D. Building up the “Accountable Ulysses” model. The impact of GDPR and national
implementations, ethics, and health-data research: comparative remarks. _Comput. Law Secur. Rev._ 37, 105413 (2020). Article Google Scholar * Yip, M. et al. Artificial intelligence meets
medical robotics. _Science_ 381, 141–146 (2023). Article Google Scholar * Wong, Y. T. et al. The study on artificial intelligence (AI) colonoscopy in affecting the rate of polyp detection
in colonoscopy: a single centre retrospective study. _Surg. Pract._ 26, 115–119 (2022). Article Google Scholar * Mayor, N., Coppola, A. S. & Challacombe, B. Past, present and future of
surgical robotics. _Trends Urol. Mens Health_ 13, 7–10 (2022). Article Google Scholar * Tranter-Entwistle, I., Eglinton, T., Hugh, T. J. & Connor, S. Use of prospective video analysis
to understand the impact of technical difficulty on operative process during laparoscopic cholecystectomy. _HPB_ 24, 2096–2103 (2022). Article Google Scholar * van Kolfschooten, H. &
van Oirschot, J. The EU artificial intelligence act (2024): implications for healthcare. _Health Policy_ 149, 105152 (2024). Article Google Scholar Download references ACKNOWLEDGEMENTS The
authors would like to thank X. Wang (Multi-scale Medical Robotics Center Limited, funded by the Innovation and Technology Commission via AIR@InnoHK cluster) for supporting the literature
review analysis and editing process of the manuscript. AUTHOR INFORMATION AUTHORS AND AFFILIATIONS * The BioRobotics Institute, Scuola Superiore Sant’Anna, Pisa, Italy Gastone Ciuti &
Arianna Menciassi * Department of Excellence in Robotics & AI, Scuola Superiore Sant’Anna, Pisa, Italy Gastone Ciuti & Arianna Menciassi * Interdisciplinary Research Center in Health
Science, Scuola Superiore Sant’Anna, Pisa, Italy Gastone Ciuti & Arianna Menciassi * Vanderbilt University, Nashville, TN, USA Robert J. Webster III * Department of Mechanical and
Automation Engineering, The Chinese University of Hong Kong, Hong Kong, China Ka-Wai Kwok * Multi-Scale Medical Robotics Center (MRC) Ltd., Hong Kong, China Ka-Wai Kwok Authors * Gastone
Ciuti View author publications You can also search for this author inPubMed Google Scholar * Robert J. Webster III View author publications You can also search for this author inPubMed
Google Scholar * Ka-Wai Kwok View author publications You can also search for this author inPubMed Google Scholar * Arianna Menciassi View author publications You can also search for this
author inPubMed Google Scholar CONTRIBUTIONS G.C. conceived and organized the manuscript’s content together with A.M., in agreement and continuous interaction and discussions with R.J.W. III
and K-W.K. All authors equally contributed to writing, editing and revising the manuscript. CORRESPONDING AUTHOR Correspondence to Gastone Ciuti. ETHICS DECLARATIONS COMPETING INTERESTS The
authors declare no competing interests. PEER REVIEW PEER REVIEW INFORMATION _Nature Reviews Bioengineering_ thanks Ajay Pandey, Hamed Saeidi and George Mylonas for their contribution to the
peer review of this work. ADDITIONAL INFORMATION PUBLISHER’S NOTE Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
RELATED LINKS INTERNATIONAL FEDERATION OF ROBOTICS (IFR): https://ifr.org/ RIGHTS AND PERMISSIONS Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to
this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the
terms of such publishing agreement and applicable law. Reprints and permissions ABOUT THIS ARTICLE CITE THIS ARTICLE Ciuti, G., Webster, R.J., Kwok, KW. _et al._ Robotic surgery. _Nat Rev
Bioeng_ (2025). https://doi.org/10.1038/s44222-025-00294-6 Download citation * Accepted: 20 February 2025 * Published: 22 April 2025 * DOI: https://doi.org/10.1038/s44222-025-00294-6 SHARE
THIS ARTICLE Anyone you share the following link with will be able to read this content: Get shareable link Sorry, a shareable link is not currently available for this article. Copy to
clipboard Provided by the Springer Nature SharedIt content-sharing initiative